
Alors non, l’ErgonUX n’est pas une marque de cosmétique mais bel et bien le petit nom que j’ai
donné à la méthodologie que j’ai déployé lors d’une mission portant sur la conception d’un
véhicule autonome. L’objectif de cet article est de vous exposer cette méthodologie mais
nous ne présenterons pas ici les résultats détaillés de cette étude.
Au cœur des préoccupations industrielles et politiques, le développement du véhicule
autonome constitue un enjeu majeur, tant sur un plan économique que pour la sécurité
routière mais aussi le développement d’une mobilité durable. Depuis le lancement de la
Google Car en 2010, qui a donné une grande impulsion à cette innovation, les constructeurs
automobiles, ainsi que de nombreux équipementiers et instituts de recherche, travaillent sur cette thématique.
#1 Mais qu’est-ce qu’un véhicule autonome ?
Un véhicule autonome, c’est un véhicule où tout ou partie de la conduite est délégué au
système. Ce type de véhicule représente un tournant mondial dans le domaine automobile
et met en avant un bouleversement des habitudes de conduite qui sont les nôtres
aujourd’hui.
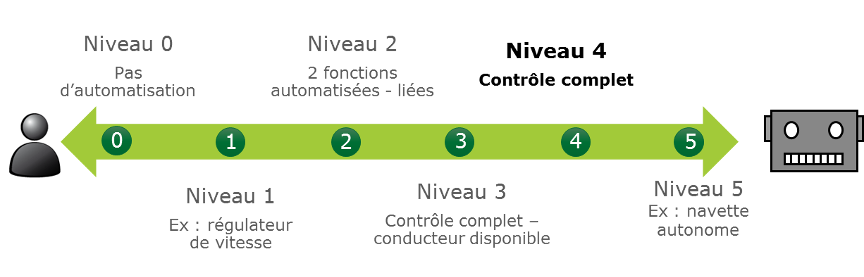
La Society of Automotive Engineers (SAE, 2016) défini 6 niveaux d’automatisation :
– Niveau 0 : Pas d’automatisation :
Le conducteur doit surveiller son environnement de conduite et exécuter la tâche complète de conduite.
– Niveau 1 : Assistance au conducteur :
Le système prend en charge une fonction de la tâche de conduite. Le conducteur a à sa charge tous les aspects de la tâche de conduite restants. Le système n’est pas capable de détecter les limites de l’ensemble de ses capacités, qui reste de la responsabilité du conducteur. Ce dernier doit donc surveiller le bon fonctionnement du système en permanence et reprendre le contrôle du véhicule immédiatement en cas de besoin. (Exemple : Tenue de voie ou régulateur de vitesse).
– Niveau 2 : Automatisation partielle :
Le système prend en charge une ou plusieurs fonctions de la tâche de conduite simultanément. Le conducteur doit surveiller le système et son environnement de conduite en permanence et il est chargé de réaliser tous les aspects de la tâche de conduite restants. Les activités non liées à la conduite ne sont pas permises. Lorsque le système identifie ses limites, le conducteur doit être en mesure de reprendre le contrôle du véhicule immédiatement. (Exemple : tenue de voie et régulateur de vitesse).
– Niveau 3 : Automatisation conditionnelle :
Le système prend en charge tous les aspects de la conduite (contrôle longitudinal et latéral). Le conducteur n’a pas à surveiller le système en permanence. Les activités non liées à la conduite sont permises de manière limitée. Le système identifie la limite de ses performances, cependant il n’est pas capable de ramener seul le véhicule dans un état de risque minimum pour toutes les situations. En conséquence, le conducteur doit être en mesure reprendre le contrôle du véhicule dans un laps de temps déterminé.
– Niveau 4 : Automatisation élevée :
Le système prend en charge tous les aspects de la conduite (contrôle longitudinal et latéral). Le conducteur n’a pas à surveiller le système en permanence. Les activités non liées à la conduite sont permises durant toute la phase de conduite autonome. Le système identifie la limite de ses performances et peut automatiquement faire face à toute situation. A l’issue de cette phase de conduite autonome, le conducteur doit être en mesure de reprendre le contrôle du véhicule.
– Niveau 5 : Automatisation complète :
Le système prend en charge tous les aspects de la conduite (contrôle longitudinal et latéral). L’action du conducteur n’est requise à aucun moment. Le système identifie la limite de ses performances et peut automatiquement faire face à toute situation survenant lors d’un trajet complet (par exemple : navette autonome ou Google Car).
Et si le Père Noël avait un traîneau autonome ?!
Adieu la fatigue pour les rennes qui pourraient alors profiter de cette soirée de partage avec les autres membres de leur tribu.
Trajet (encore plus) optimisé ; le Père Noël pourrait alors passer un peu de temps avec les enfants. Il finirait également sa tournée des cheminées plus rapidement et moins fatigué. Cela lui permettrait de rejoindre la Mère Noël et ses fidèles compagnons les lutins pour arriver à temps pour manger la fameuse bûche de Noël.
Plus aucun risque de collision avec les étoiles filantes ; plus aucun risque de détérioration ou de chute du traîneau des cadeaux donc plus aucun enfant déçu de ne pas avoir reçu le cadeau qu’il attendait tant.
Un Noël sans accroc grâce au Traineau 5.0.

Dans notre étude, nous cherchions à documenter l’activité de conduite autonome de niveau 4. Les avantages, de ce type de niveau d’automatisation, mis en avant, sont la sécurité (réduction du nombre d’accidents), la fluidification du trafic (réduction des embouteillages que l’on déteste tous) ainsi que la possibilité d’optimiser le temps de conduite pour réaliser d’autres activités (lire un journal ou regarder un film par exemple).
Cependant, l’introduction de ce type de véhicule soulève tout de même de nombreuses questions.
Le système autonome, bien que prenant en charge l’ensemble des fonctions de la conduite, peut, à tout moment, demander au conducteur de reprendre le contrôle du véhicule.
Le conducteur n’est donc plus responsable, ni de la conduite, ni de la sécurité du véhicule. Il n’a donc pas pour obligation de surveiller l’environnement, ni le comportement du système.
La question de la capacité du conducteur à reprendre le contrôle du véhicule, après avoir été «déconnecté» de la conduite est alors tout à fait légitime.
#2 Un rapide tour d’horizon sur les effets de l’automatisation
En 1983, Bainbridge soulignait déjà l’ironie que l’automatisation provoque. En effet, les tâches les plus simples sont déléguées à la machine et l’opérateur humain doit alors réaliser les tâches les plus complexes. Freyssenet (1984) complète ces propos selon lesquels l’automatisation peut rendre les dimensions difficiles de la tâche encore plus difficiles ; et qu’elle influence négativement le développement de compétence, crée une diminution de l’attention à l’événement exceptionnel (exigeant une décision rapide) ainsi qu’une angoisse de l’attente de l’incident.
Par ailleurs, différentes études mettent en avant que les performances de conduite après une phase de conduite automatisée diminuent plus le niveau d’automatisation augmente et lorsque le conducteur réalise des activités de vie à bord.
Cela peut alors remettre en question les avantages de la sécurité et de la possibilité de réaliser d’autres activités que l’on pourrait attendre de l’automatisation.

#3 Le paradoxe de conception
Comme nous l’avons dit, nous cherchions à documenter l’activité de conduite autonome de niveau 4. Mais ce type de véhicule n’est pas encore commercialisé et nous faisons face à plusieurs obstacles :
En effet, d’un point de vue technique, les prototypes, bien qu’étant de plus en plus évolués, restent limités et nécessitent une supervision constante. Donc cela ne s’apparente plus à du niveau 4.
D’un point de vue juridique, même si des véhicules autonomes de niveau 4 étaient commercialisés, d’après la convention de Vienne, les conducteurs doivent garder le contrôle du véhicule et restent responsables du véhicule durant la conduite autonome ; donc ils doivent regarder la route et avoir les mains sur le volant. Du coup il ne s’agit plus d’un véhicule autonome de niveau 4 mais plutôt de niveau 3.
Du côté des prototypes, ils ne peuvent être pilotés que par des experts.
Il est dès lors impossible d’observer, à ce jour, les usages de ce type de dispositif en situation réelle, ni de comprendre l’activité de conduite déléguée, étant donné que cette dernière n’existe pas encore. C’est ce que l’on appelle le paradoxe de conception (Theureau et Pinsky, 1984; Daniellou, 2004).
Notre objectif était alors de trouver un moyen de pallier ce paradoxe afin d’anticiper au plus tôt les usages des futurs utilisateurs et de les intégrer aux différentes étapes de conception de ce type de véhicule.
Pour ce faire, nous avons étudié des situations, dites de référence, de conduite assistée ; et des situations simulées sur simulateur et sur piste.
#4 Activités de conduite étudiées
Trois types de situations de conduite ont été analysés :
- Des situations de conduite avec système d’aide à la conduite :
L’analyse porte sur l’activité de trois conducteurs avec un véhicule équipé de différents systèmes d’aides à la conduite. Nous avons observé la réalisation de deux trajets avec chaque conducteur et nous avons cherché à renseigner leur activité liée à l’utilisation de leur système d’aide à la conduite.

- Une situation de conduite autonome sur simulateur :
L’analyse concerne l’activité de vingt-neuf conducteurs ayant été en situation de conduite déléguée sur le simulateur C-CARDS de Renault. Les conducteurs ont réalisé trois trajets de 15 minutes, sur autoroute limitée à 110 km/h. Sur ces 15 minutes, les conducteurs ont activé la conduite autonome durant environ 10 minutes, à la fin desquelles le système leur demandait de reprendre le contrôle du véhicule.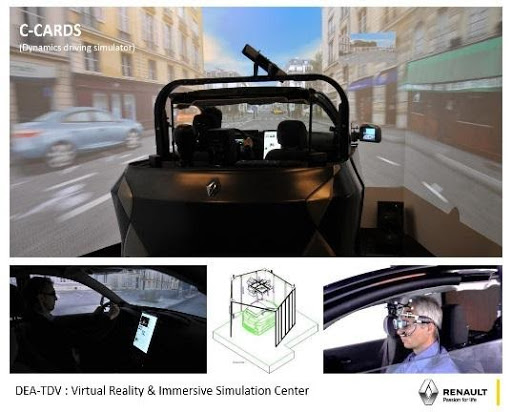
- Une situation de conduite autonome simulée sur piste :
Cette analyse porte sur l’activité de neuf conducteurs. Pour ce faire, nous avons conçu un véhicule Magicien d’Oz, pouvant être piloté classiquement en position conducteur (à partir du volant et des pédales) mais aussi par un copilote, à partir d’un joystick dissimulé au conducteur. Lorsque le conducteur pensait activer la conduite autonome, le copilote prenait alors le contrôle du véhicule (via le joystick). Les conducteurs ont réalisé trois trajets de 15 minutes, sur la piste routière de Satory, que nous avions limité à 50 km/h (pour des raisons de sécurité). Sur ces 15 minutes, les conducteurs ont activé la conduite autonome durant environ 12 minutes, à la fin desquelles le système leur demande de reprendre le contrôle du véhicule.

#5 Méthodologie de récolte de données
Dans nos études, nous avions deux types de données, les données extrinsèques (ou données à la « 3ème personne ») et les données intrinsèques (ou données à la « 1ère personne »).
Les données dites extrinsèques sont les données des sujets, relevées par l’observateur. Elles ne prennent pas en compte le vécu de la situation du sujet. Il s’agit de toutes les données non subjectives recueillies sur le sujet, l’observable. Par exemple, des temps de réactions, des données biomécaniques, des mesures de fréquence, etc.
Les données dites intrinsèques sont des données basées sur le « point de vue du sujet agissant » (Vermersch, 2010). Ces données ne sont pas du même ordre ; elles sont difficiles à quantifier mais nous renseignent sur les parties inobservables de l’activité du sujet. Il s’agit alors d’accéder aux expériences dites « vécues » des usagers et donc à leur propre point de vue sur l’activité menée (Cahour et Créno, 2017)
L’objectif est de mettre en relation le point de vue extrinsèque sur l’activité, celui du chercheur qui observe le sujet en train d’agir et le point de vue intrinsèque sur l’activité, celui du sujet qui agit dans un contexte situationnel qui fait sens pour lui. C’est ce qu’on appelle la triangulation des méthodes (Flick,1992).
Dans notre recherche, nous mettons les deux types de données au centre de nos études pour mieux comprendre l’activité du conducteur en situation de conduite autonome et de reprise en main.
La méthodologie de recueil de données n’a pas été tout à fait la même pour les trois situations.
Pour les situations de référence, nous étions à bord du véhicule avec le conducteur. Durant les trajets, nous demandions au conducteur de verbaliser son activité (dans la mesure du possible).
Un relevé papier/crayon nous pragmatisme permettait par ailleurs de recueillir des éléments contextuels pour compléter les enregistrements.
Malgré des angles de prise de vue serrés, nous avons également filmé et photographié certains moments de son activité et les artefacts utilisés.
La méthodologie de recueil de donnée sur simulateur et sur le véhicule Magicien d’Oz était, quant à elle, assez proche.
Les deux véhicules étaient dotés de nombreux capteurs qui nous ont permis de relever de multiples données telles que la vitesse du véhicule, les interactions avec le volant, les boutons, les pédales (frein ou accélérateur), les clignotants, la présence / absence des mains sur le volant (grâce à des capteurs de présence), ou encore l’état du véhicule (conduite manuelle, conduite autonome disponible, conduite autonome, demande de reprise en main).
Ils étaient également équipés de quatre caméras synchronisées dont le contenu filmé était enregistré. Sur simulateur, les conducteurs étaient équipés d’un oculomètre de type lunette.

A gauche : capture de l’enregistrement des quatre caméras synchronisées. A droite : Photographie d’un conducteur portant l’oculomètre (en haut) et de la retransmission de la vidéo de l’oculomètre (en bas).
Enfin, pour les trois études, nous avons réalisé des entretiens avec les conducteurs après chaque situation de conduite.
#6 « KPI »
Pour les situations de conduite assistée, nous avons relevé le temps d’utilisation des systèmes d’aide à la conduite, les fréquences et raisons de leur activation et désactivation.
Pour les situations de conduite autonome sur simulateur et avec le véhicule magicien d’Oz, nous nous sommes intéressés à :
- L’activité de conduite autonome au travers notamment de la réalisation d’activité de vie à bord (lecture, utilisation du téléphone par exemple) et de ses interruptions :
- Temps écoulé entre l’activation du système autonome et la réalisation de l’activité de vie à bord (utilisation du téléphone, lecture)
- Temps total de réalisation d’activité de vie à bord par rapport au temps de conduite autonome
- Temps maximal de réalisation d’activité de vie à bord sans interruption
- Nombre, durée, fréquence et type d’interruption de la réalisation d’activité de vie à bord
- L’activité de désactivation du système autonome au travers des différentes actions réalisées entre la demande de reprise en main du système et la reprise en main effective du véhicule :
- Temps mis pour arrêter la réalisation de leur activité de vie à bord
- Compréhension de l’alerte sonore via l’IHM
- Reprise d’informations de l’environnement routier
- Retour en position de conducteur (se libérer les mains, les remettre sur le volant ; remettre le pied au-dessus de/sur la pédale, se repositionner dans le siège, regarder la route)
- Temps pour désactiver le système
- Modalité de désactivation du système
#7 Conclusion
Comme nous l’avons dit, l’objectif de cet article n’était pas de présenter les résultats des trois études que nous avons présentées mais bien de mettre en avant l’apport, pour la conception du véhicule autonome, de la, ou plutôt des méthodologies mises en place.
L’ensemble de ces analyses nous ont en effet permis d’élaborer des connaissances sur les besoins et objectifs des utilisateurs en situation de conduite autonome et d’anticiper les usages de ce type de véhicule, afin de proposer des perspectives de conception anthropocentrée.
Au-delà des améliorations des IHM ou des principes de fonctionnement du véhicule autonome, cette recherche aura permis de mettre en avant des éléments qui font écho à l’ironie de l’automatisation que nous avons déjà abordée en début d’article.
En effet, en situation de conduite autonome, de nombreux conducteurs ont désactivé le système autonome, et donc repris le contrôle du véhicule, avant d’être en mesure de redevenir des conducteurs maîtres de leur véhicule.
Certains conducteurs ont repris le contrôle du véhicule avant d’avoir regardé la route ; et quasiment tous les conducteurs l’ont fait sans avoir pris le temps de regarder leurs rétroviseurs. Ils ont donc repris le contrôle du véhicule sans avoir l’ensemble des informations de la conduite.
« au moment où je reprends le contrôle je n’ai pas forcément toutes les informations de ce qui m’entoure. Il y a un temps pour se déconnecter de ce qu’on fait, pour analyser la situation qui est complètement nouvelle, la vitesse, la situation sur la route par rapport aux autres. Du coup je reviens progressivement alors que j’ai repris le contrôle tout de suite. »
(Extraits d’entretiens).
D’autres ont repris le contrôle du véhicule avant d’avoir remis les mains sur le volant ou bien en tenant encore l’objet de leur activité de vie à bord, n’ayant pas eu le temps de s’en libérer.
« Il y a un petit moment de flottement. […] Donc j’ai repris le contrôle mais mes mains ne sont pas encore actives. Et c’est pas normal. En fait je ne saisis pas immédiatement le volant parce que je n’ai pas l’impression d’être aux commandes du véhicule. Et je me revois avoir ce délai et me dire “pourquoi tu ne reprends pas le volant en main”. […] Il y a un moment où le véhicule est sans contrôle en termes de direction. Pendant un petit laps de temps, personne n’est au contrôle du véhicule. »
(Extraits d’entretien).

Photographies d’un conducteur qui reprend le contrôle du véhicule sans prendre le temps de poser le magazine qu’il lisait durant la conduite autonome.
Enfin, les conducteurs ayant un dispositif de correction de la vue (de loin, pour conduire ou de près, pour réaliser leur activité de vie à bord durant la conduite autonome) ont repris le contrôle du véhicule sans prendre le temps de remettre ou d’enlever leurs lunettes. Ils ont donc repris le contrôle du véhicule sans avoir la bonne correction visuelle.

La photographie ci-contre nous montre un conducteur qui n’a pas pris le temps de retirer ses lunettes (dont il avait besoin en conduite autonome afin de lire ses messages sur son téléphone portable) avant de reprendre le contrôle du véhicule. On remarque qu’il peut malgré tout regarder la route sans ses lunettes en baissant la tête et en regardant par-dessus ces dernières.
Cette situation n’a pas pu être palliée pour les conducteurs qui ont enlevé leurs lunettes lors de la réalisation de leur activité de vie à bord et qui ont repris le contrôle avant d’avoir pu les remettre.
On peut alors se questionner sur les avantages en termes de sécurité routière mis en avant, quant à l’utilisation de ce type de véhicule. En effet, il est probable, qu’avec un système performant, le nombre d’accident, en conduite autonome, diminue. Mais celui-ci ne risque-t-il pas d’augmenter du fait des accidents créés au moment de la reprise en main du véhicule ?
Par ailleurs, est-ce que cela ne pose pas quelques problèmes d’éthique de mettre le conducteur dans une position qu’il ne serait pas en mesure de gérer correctement ? Est-ce que ce type de véhicule donne les moyens aux conducteurs d’être de «bons» conducteurs ? Ou au contraire, ne réduit-il pas leurs capacités d’agir en tant que conducteur ? Est-ce que les conducteurs accepteront d’acheter un véhicule qui pourrait les mettre, au moment de la reprise en main, dans une situation plus dangereuse que sans l’automatisation ?
« Je passe de totalement déconnecté à devoir être conducteur opérationnel. […] On ne me donne pas toutes les billes pour redevenir opérationnel. »
(Extraits d’entretiens).
Ces questions se posent donc également pour le Traineau 5.0 : est-ce qu’il permettra au Père Noël d’être aussi efficace qu’avec ses rennes ? Est-ce que, étant complètement déconnecté de sa tournée des cheminées, il n’oubliera pas quelques maisons ? Au plus grand désarroi des enfants…
À demain pour de nouvelles surprises sur notre calendrier de l’Avent UX-Republic !
Céline POISSON, UX Researcher @UX-Republic – Docteure en Ergonomie
[actionbox color=”default” title=”Formation DESIGN SPRINT -20%” description=”-20% de promotion sur la session de formation DESIGN SPRINT de Décembre en donnant le code 12-UX-DEC lors de votre inscription ! Il est encore temps…” btn_label=”Nos formations” btn_link=”http://training.ux-republic.com” btn_color=”primary” btn_size=”big” btn_icon=”star” btn_external=”1″]
