
Also nein, ErgonUX ist keine Kosmetikmarke, sondern der kleine Name, den ich habe
der Methodik gegeben, die ich während einer Mission im Zusammenhang mit der Gestaltung von a
autonomes Fahrzeug. Das Ziel dieses Artikels ist es, Ihnen diese Methodik vorzustellen, aber
wir werden die detaillierten Ergebnisse dieser Studie hier nicht präsentieren.
Im Mittelpunkt industrieller und politischer Belange steht die Entwicklung des Fahrzeugs
Autonomes Fahren ist sowohl wirtschaftlich als auch sicherheitstechnisch eine große Herausforderung
Straßen, sondern auch die Entwicklung nachhaltiger Mobilität. Seit dem Start des
Google Car im Jahr 2010, das dieser Innovation große Impulse gab, Hersteller
Automobile sowie viele Gerätehersteller und Forschungsinstitute arbeiten an diesem Thema.
#1 Aber was ist ein autonomes Fahrzeug?
Ein autonomes Fahrzeug ist ein Fahrzeug, bei dem das Fahren ganz oder teilweise an das Fahrzeug delegiert wird
System. Dieser Fahrzeugtyp stellt einen weltweiten Wendepunkt im Automobilbereich dar
und hebt einen Umbruch in unseren Fahrgewohnheiten hervor
heute.
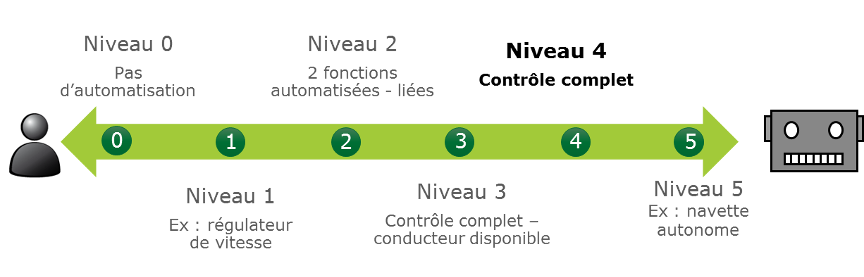
Die Society of Automotive Engineers (SAE, 2016) definiert 6 Automatisierungsstufen:
- NIVEAU 0 : Keine Automatisierung:
Der Fahrer sollte seine Fahrumgebung überwachen und die komplette Fahraufgabe ausführen.
- NIVEAU 1 : Fahrassistenz:
Das System unterstützt eine Funktion der Fahraufgabe. Der Fahrer ist für alle übrigen Aspekte der Fahraufgabe verantwortlich. Das System ist nicht in der Lage, die Grenzen all seiner Fähigkeiten zu erkennen, was in der Verantwortung des Fahrers bleibt. Dieser muss daher jederzeit die ordnungsgemäße Funktion des Systems überwachen und gegebenenfalls unverzüglich die Kontrolle über das Fahrzeug zurückerlangen. (Beispiel: Spurhalteassistent oder Tempomat).
- NIVEAU 2 : Teilautomatisierung:
Das System unterstützt gleichzeitig eine oder mehrere Funktionen der Fahraufgabe. Der Fahrer muss das System und seine Fahrumgebung kontinuierlich überwachen und ist für die Ausführung aller verbleibenden Aspekte der Fahraufgabe verantwortlich. Fahrfremde Tätigkeiten sind nicht gestattet. Erkennt das System seine Grenzen, soll der Fahrer sofort wieder die Kontrolle über das Fahrzeug übernehmen können. (Beispiel: Spurhalte- und Tempomat).
- NIVEAU 3 : Bedingte Automatisierung:
Das System übernimmt alle Aspekte des Fahrens (Längs- und Querführung). Der Fahrer muss das System nicht ständig überwachen. Tätigkeiten, die nicht mit dem Fahren zusammenhängen, sind eingeschränkt erlaubt. Das System erkennt die Grenze seiner Leistungsfähigkeit, ist jedoch nicht in der Lage, das Fahrzeug in allen Situationen wieder in einen Zustand minimalen Risikos zu bringen. Folglich muss der Fahrer in der Lage sein, die Kontrolle über das Fahrzeug innerhalb einer bestimmten Zeitspanne wiederzuerlangen.
- NIVEAU 4 : Hohe Automatisierung:
Das System übernimmt alle Aspekte des Fahrens (Längs- und Querführung). Der Fahrer muss das System nicht ständig überwachen. Fahrfremde Tätigkeiten sind während der gesamten Phase des autonomen Fahrens erlaubt. Das System erkennt die Grenzen seiner Leistungsfähigkeit und kann jede Situation automatisch meistern. Am Ende dieser autonomen Fahrphase muss der Fahrer in der Lage sein, die Kontrolle über das Fahrzeug wieder zu erlangen.
- NIVEAU 5 : Vollautomatisierung:
Das System übernimmt alle Aspekte des Fahrens (Längs- und Querführung). Eine Aktion des Fahrers ist zu keinem Zeitpunkt erforderlich. Das System erkennt die Grenzen seiner Leistungsfähigkeit und kann jede Situation, die während einer kompletten Fahrt auftritt, automatisch bewältigen (Beispiel: autonomes Shuttle oder Google Car).
Was wäre, wenn der Weihnachtsmann einen autonomen Schlitten hätte?!
Verabschieden Sie sich von der Müdigkeit für die Rentiere, die dann diesen Abend genießen konnten, um sie mit den anderen Mitgliedern ihres Stammes zu teilen.
Route (noch mehr) optimiert; Der Weihnachtsmann könnte dann einige Zeit mit den Kindern verbringen. Er würde auch seine Runde durch die Schornsteine schneller und weniger müde beenden. Dies würde es ihm ermöglichen, sich Mrs. Claus und ihren treuen Gefährten, den Elfen, anzuschließen, um rechtzeitig anzukommen, um das berühmte Weihnachtsscheit zu essen.
Keine Kollisionsgefahr mehr mit Sternschnuppen; Kein Risiko mehr, dass der Geschenkeschlitten beschädigt wird oder herunterfällt, sodass Kinder nicht mehr enttäuscht sind, das Geschenk nicht erhalten zu haben, auf das sie so sehr gewartet haben.
Ein reibungsloses Weihnachtsfest dank Sled 5.0.

In unserer Studie wollten wir die autonome Fahraktivität der Stufe 4 dokumentieren.Die angeführten Vorteile dieser Art der Automatisierung sind Sicherheit (Reduzierung der Unfallzahl), Verkehr (Reduzierung von Staus, die wir alle hassen) sowie die Möglichkeit, die Fahrzeit für andere Aktivitäten zu optimieren (z. B. Zeitung lesen oder einen Film ansehen).
Die Einführung dieses Fahrzeugtyps wirft jedoch noch viele Fragen auf.
Das autonome System übernimmt zwar alle Fahrfunktionen, kann den Fahrer aber jederzeit auffordern, die Kontrolle über das Fahrzeug wiederzuerlangen.
Der Fahrer ist daher nicht mehr für das Fahren oder die Sicherheit des Fahrzeugs verantwortlich. Es ist daher nicht verpflichtet, die Umgebung oder das Verhalten des Systems zu überwachen..
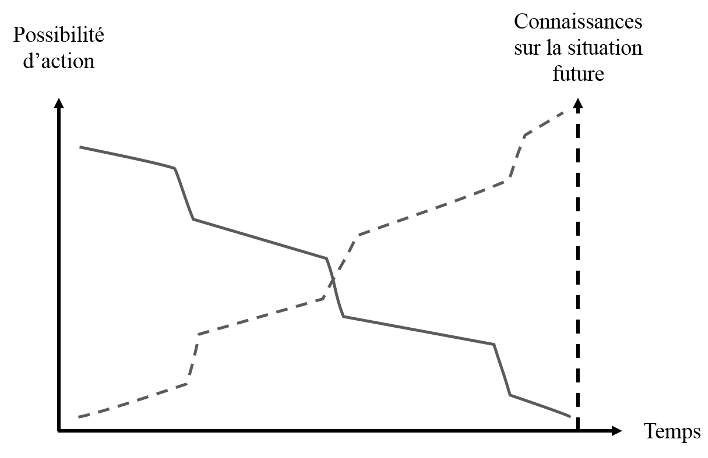
Die Frage nach der Fähigkeit des Fahrers, die Kontrolle über das Fahrzeug wiederzuerlangen, nachdem er vom Fahren „abgekoppelt“ wurde, ist dann völlig legitim.
#2 Ein schneller Überblick über die Auswirkungen der Automatisierung
Bereits 1983 unterstrich Bainbridge die Ironie, die die Automatisierung provoziert. Tatsächlich werden die einfachsten Aufgaben an die Maschine delegiert und der menschliche Bediener muss dann die komplexesten Aufgaben ausführen. Freyssenet (1984) vervollständigt diese Aussagen, wonach Automatisierung die schwierigen Dimensionen der Aufgabe noch erschweren kann; und dass es die Kompetenzentwicklung negativ beeinflusst, eine Abnahme der Aufmerksamkeit für das außergewöhnliche Ereignis (das eine schnelle Entscheidung erfordert) sowie eine Angst vor dem Warten auf das Ereignis erzeugt.
Darüber hinaus zeigen verschiedene Studien, dass die Fahrleistung nach einer automatisierten Fahrphase mit zunehmendem Automatisierungsgrad und bei der Ausübung von Lebensaktivitäten des Fahrers an Bord abnimmt.
Dies kann dann die Vorteile der Sicherheit und die Fähigkeit, andere Aktivitäten auszuführen, die man von der Automatisierung erwarten würde, in Frage stellen.

#3 Das Design-Paradoxon
Wie gesagt, wollten wir autonome Fahraktivitäten der Stufe 4 dokumentieren, aber dieser Fahrzeugtyp ist noch nicht kommerzialisiert und wir stehen vor mehreren Hindernissen:
Aus technischer Sicht bleiben die Prototypen zwar immer fortschrittlicher, bleiben jedoch begrenzt und erfordern eine ständige Überwachung. Es ist also nicht mehr wie Stufe 4.
Auch wenn autonome Fahrzeuge der Stufe 4 vermarktet werden, muss aus rechtlicher Sicht nach der Wiener Konvention der Fahrer während des autonomen Fahrens die Kontrolle über das Fahrzeug behalten und für das Fahrzeug verantwortlich bleiben; Sie müssen also auf die Straße achten und ihre Hände am Lenkrad haben. Es handelt sich also nicht mehr um ein autonomes Fahrzeug der Stufe 4, sondern um Stufe 3.
Die Prototypen können nur von Experten pilotiert werden.
Es ist daher bis heute unmöglich, die Verwendung dieses Gerätetyps in realen Situationen zu beobachten oder die Aktivität des delegierten Fahrens zu verstehen, da letzteres noch nicht existiert. Dies wird als Designparadox bezeichnet (Theureau und Pinsky, 1984; Daniellou, 2004).
Unser Ziel war es dann, einen Weg zu finden, dieses Paradoxon zu überwinden, um die Verwendung zukünftiger Benutzer so schnell wie möglich zu antizipieren und sie in die verschiedenen Designphasen dieses Fahrzeugtyps zu integrieren.
Dazu haben wir sogenannte Referenzsituationen des assistierten Fahrens untersucht; und simulierte Simulator- und Streckensituationen.
#4 Fahrtätigkeiten untersucht
Drei Arten von Fahrsituationen wurden analysiert:
- Fahrsituationen mit Fahrassistenzsystem :
Die Analyse betrifft die Aktivität von drei Fahrern mit einem Fahrzeug, das mit unterschiedlichen Fahrassistenzsystemen ausgestattet ist. Wir beobachteten die Durchführung von zwei Fahrten mit jedem Fahrer und versuchten, ihre Aktivitäten im Zusammenhang mit der Nutzung ihres Fahrerassistenzsystems zu informieren.

- Eine autonome Fahrsituation auf einem Simulator :
Die Analyse betrifft die Aktivität von neunundzwanzig Fahrern, die sich in einer delegierten Fahrsituation auf dem C-CARDS-Simulator von Renault befanden. Die Fahrer absolvierten drei 15-minütige Fahrten auf der auf 110 km/h begrenzten Autobahn. Von diesen 15 Minuten aktivierten die Fahrer für etwa 10 Minuten das autonome Fahren, an dessen Ende das System sie aufforderte, die Kontrolle über das Fahrzeug wiederzuerlangen.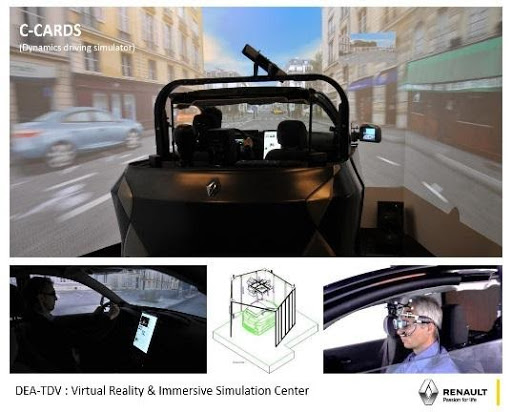
- Eine simulierte autonome Fahrsituation auf der Strecke :
Diese Analyse bezieht sich auf die Aktivität von neun Fahrern. Dazu haben wir ein Wizard of Oz-Fahrzeug entworfen, das in der klassischen Fahrerposition (über Lenkrad und Pedale), aber auch von einem Beifahrer über einen vor dem Fahrer verborgenen Joystick gefahren werden kann. Als der Fahrer daran dachte, das autonome Fahren zu aktivieren, übernahm der Beifahrer die Kontrolle über das Fahrzeug (über den Joystick). Die Fahrer machten drei 15-minütige Fahrten auf der Satory-Strecke, die wir (aus Sicherheitsgründen) auf 50 km/h begrenzt hatten. Von diesen 15 Minuten aktivierten die Fahrer für etwa 12 Minuten das autonome Fahren, danach fordert das System sie auf, die Kontrolle über das Fahrzeug wiederzuerlangen.

#5 Methodik der Datenerhebung
In unseren Studien hatten wir zwei Arten von Daten, extrinsische Daten (oder „3rd-Person“-Daten) und intrinsische Daten (oder „1st-Person“-Daten).
Die sogenannten extrinsischen Daten sind die vom Beobachter erfassten Daten der Probanden. Sie berücksichtigen nicht die Erfahrung der Situation des Subjekts. Es sind alle nicht-subjektiven Daten, die zu dem Thema erhoben werden, das Beobachtbare. Beispielsweise Reaktionszeiten, biomechanische Daten, Frequenzmessungen etc.
Sogenannte intrinsische Daten sind Daten, die auf der Sicht des „handelnden Subjekts“ beruhen (Vermersch, 2010). Diese Daten sind nicht von derselben Größenordnung; sie sind schwer zu quantifizieren, informieren uns aber über die nicht beobachtbaren Teile der Aktivität des Subjekts. Es geht dann darum, auf die sogenannten „gelebten“ Erfahrungen der Benutzer und damit auf ihre eigene Sichtweise auf die durchgeführte Aktivität zuzugreifen (Cahour und Créno, 2017).
Ziel ist es, den extrinsischen Blickwinkel auf die Aktivität, den des Forschers, der das Handeln des Subjekts beobachtet, und den intrinsischen Blickwinkel auf die Aktivität, den des Subjekts, der in einem situativen Kontext handelt, in Beziehung zu setzen, der für ihn sinnvoll ist. Dies wird Methodentriangulation genannt (Flick, 1992).
In unserer Forschung stellen wir beide Arten von Daten in den Mittelpunkt unserer Studien, um die Aktivität des Fahrers in einer Situation des autonomen Fahrens und der Erholung besser zu verstehen.
Die Datenerhebungsmethodik war für die drei Situationen nicht ganz gleich.
Für die Referenzsituationen waren wir mit dem Fahrer im Fahrzeug. Während der Fahrten haben wir den Fahrer gebeten, seine Tätigkeit (soweit möglich) zu verbalisieren.
Eine Papier/Bleistift-Erklärung ermöglichte es uns auch, kontextbezogene Elemente pragmatisch zu sammeln, um die Aufzeichnungen zu vervollständigen.
Trotz enger Kamerawinkel filmten und fotografierten wir auch einige Momente seiner Tätigkeit und der verwendeten Artefakte.
Die Methodik zum Sammeln von Daten über den Simulator und über das Fahrzeug des Zauberers von Oz war ziemlich ähnlich.
Beide Fahrzeuge waren mit zahlreichen Sensoren ausgestattet, die es uns ermöglichten, mehrere Daten wie Fahrzeuggeschwindigkeit, Interaktionen mit dem Lenkrad, Knöpfe, Pedale (Bremse oder Gas), Blinker, Vorhandensein / Fehlen von Händen am Lenkrad (dank Präsenz Sensoren) oder auch der Zustand des Fahrzeugs (manuelles Fahren, autonomes Fahren verfügbar, autonomes Fahren, Übernahmewunsch).
Sie waren außerdem mit vier synchronisierten Kameras ausgestattet, deren gefilmte Inhalte aufgezeichnet wurden. Auf dem Simulator wurden die Fahrer mit einem teleskopartigen Eyetracker ausgestattet.

links : Erfassung der Aufzeichnung der vier synchronisierten Kameras. Recht : Foto eines Fahrers, der den Eyetracker trägt (oben) und die Rückübertragung des Videos vom Eyetracker (unten).
Abschließend führten wir für die drei Studien nach jeder Fahrsituation Interviews mit den Fahrern durch.
#6 "KPI"
Für assistierte Fahrsituationen haben wir den Zeitpunkt der Nutzung der Fahrassistenzsysteme, die Häufigkeiten und Gründe für deren Aktivierung und Deaktivierung notiert.
Für autonome Fahrsituationen am Simulator und mit dem Wizard-of-Oz-Fahrzeug interessierten uns:
- Autonome Fahrtätigkeit, insbesondere durch die Ausübung von Lebensaktivitäten an Bord (z. B. Lesen, Telefonieren) und deren Unterbrechungen :
- Zeit, die zwischen der Aktivierung des autonomen Systems und dem Abschluss der Aktivität an Bord verstrichen ist (Telefonnutzung, Lesen)
- Gesamtzeit für die Beendigung der Lebensaktivität an Bord im Vergleich zur autonomen Fahrzeit
- Maximale Zeit für die Durchführung von Lebensaktivitäten an Bord ohne Unterbrechung
- Anzahl, Dauer, Häufigkeit und Art der Unterbrechung bei der Ausübung von Lebenstätigkeiten an Bord
- Die Aktivität des Deaktivierens des autonomen Systems durch die verschiedenen Aktionen, die zwischen der Aufforderung zur Übernahme des Systems und der tatsächlichen Übernahme des Fahrzeugs durchgeführt werden :
- Die Zeit, die benötigt wird, um die Durchführung ihrer Lebensaktivitäten an Bord einzustellen
- Verstehen des akustischen Alarms über das HMI
- Abrufen von Informationen aus der Straßenumgebung
- In die Fahrposition zurückkehren (Hände loslassen, sie wieder auf das Lenkrad legen; Fuß wieder über/auf das Pedal stellen, sich wieder auf den Sitz setzen, auf die Straße schauen)
- Zeit, das System zu deaktivieren
- Systemdeaktivierungsmodus
#7 Zusammenfassung
Wie bereits erwähnt, bestand das Ziel dieses Artikels nicht darin, die Ergebnisse der drei von uns vorgestellten Studien vorzustellen, sondern den Beitrag der bzw. der eingeführten Methoden für die Gestaltung des autonomen Fahrzeugs hervorzuheben.
All diese Analysen haben es uns in der Tat ermöglicht, Erkenntnisse über die Bedürfnisse und Ziele der Benutzer in Situationen des autonomen Fahrens zu entwickeln und die Verwendung dieses Fahrzeugtyps zu antizipieren, um Perspektiven des anthropozentrischen Designs vorzuschlagen.
Abgesehen von den Verbesserungen der HMIs oder der Funktionsprinzipien des autonomen Fahrzeugs wird es diese Forschung ermöglicht haben, Elemente hervorzuheben, die die Ironie der Automatisierung widerspiegeln, die wir bereits zu Beginn des Artikels besprochen haben.
Tatsächlich haben viele Fahrer in einer autonomen Fahrsituation das autonome System deaktiviert und daher die Kontrolle über das Fahrzeug wiedererlangt, bevor sie wieder Fahrer der Kontrolle über ihr Fahrzeug werden können.
Einige Fahrer erlangten die Kontrolle über das Fahrzeug zurück, bevor sie auf die Straße blickten; und fast alle Fahrer haben dies getan, ohne sich die Zeit zu nehmen, in ihre Spiegel zu schauen. Sie erlangten daher die Kontrolle über das Fahrzeug zurück, ohne über alle Fahrinformationen zu verfügen.
„Wenn ich die Kontrolle wiedererlange, habe ich nicht unbedingt alle Informationen darüber, was mich umgibt. Es gibt eine Zeit, um von dem abzuschalten, was man tut, um die Situation zu analysieren, die völlig neu ist, die Geschwindigkeit, die Situation auf der Straße im Vergleich zu anderen. Also komme ich allmählich zurück, während ich sofort die Kontrolle wiedererlangt habe. »
(Auszüge aus Interviews).
Andere erlangten die Kontrolle über das Fahrzeug zurück, bevor sie ihre Hände wieder ans Lenkrad nahmen oder während sie das Objekt ihrer Lebenstätigkeit noch an Bord hielten, ohne Zeit gehabt zu haben, sich davon zu befreien.
„Es gibt einen kleinen Moment des Zögerns. […] Also habe ich die Kontrolle wiedererlangt, aber meine Hände sind noch nicht aktiv. Und es ist nicht normal. Tatsächlich greife ich nicht sofort zum Lenkrad, weil ich nicht das Gefühl habe, die Kontrolle über das Fahrzeug zu haben. Und ich sehe, wie ich diese Verzögerung habe und mir sage: „Warum nimmst du nicht das Steuer in die Hand?“. […] Es gibt einen Moment, in dem das Fahrzeug richtungslos ist. Für kurze Zeit hat niemand die Kontrolle über das Fahrzeug. »
(Interviewauszüge).

Fotografien eines Fahrers, der beim autonomen Fahren die Kontrolle über das Fahrzeug wiedererlangt, ohne sich die Zeit zu nehmen, die Zeitschrift, die er liest, wegzulegen.
Schließlich erlangten Fahrer mit einem Sehkorrekturgerät (aus der Ferne, um zu fahren oder in der Nähe, um ihre Lebenstätigkeit an Bord während des autonomen Fahrens auszuführen) die Kontrolle über das Fahrzeug zurück, ohne sich die Zeit zu nehmen, ihre Brille aufzusetzen oder abzunehmen. Sie erlangten daher die Kontrolle über das Fahrzeug zurück, ohne über die richtige visuelle Korrektur zu verfügen.

Das nebenstehende Foto zeigt uns einen Fahrer, der sich nicht die Zeit genommen hat, seine Brille abzunehmen (die er beim autonomen Fahren brauchte, um seine Nachrichten auf seinem Handy zu lesen), bevor er die Kontrolle über das Fahrzeug wiedererlangte. Wir bemerken, dass er immer noch ohne seine Brille auf die Straße schauen kann, indem er seinen Kopf senkt und über sie hinwegschaut.
Diese Situation konnte für Fahrer nicht behoben werden, die ihre Brille bei der Ausübung ihrer Lebenstätigkeit an Bord abgenommen und die Kontrolle wiedererlangt hatten, bevor sie sie wieder aufsetzen konnten.
Man kann sich dann fragen, welche Vorteile in Bezug auf die Verkehrssicherheit in Bezug auf die Verwendung dieses Fahrzeugtyps angeführt werden. Tatsächlich ist es wahrscheinlich, dass mit einem effizienten System die Zahl der Unfälle beim autonomen Fahren sinken wird. Aber wird sich diese Zahl nicht durch Unfälle bei der Fahrzeugübernahme erhöhen?
Außerdem, stellt es nicht einige ethische Probleme dar, den Fahrer in eine Position zu bringen, mit der er nicht richtig umgehen könnte? Gibt dieser Fahrzeugtyp den Fahrern die Möglichkeit, „gute“ Fahrer zu sein? Oder verringert es im Gegenteil nicht ihre Fähigkeit, als Fahrer zu agieren? Werden die Fahrer bereit sein, ein Fahrzeug zu kaufen, das sie, wenn sie die Kontrolle übernehmen, in eine gefährlichere Situation bringen könnte als ohne Automatisierung?
„Ich gehe von völlig getrennt zu einem einsatzbereiten Fahrer. […] Mir werden nicht alle Eier gegeben, um wieder einsatzfähig zu werden. »
(Auszüge aus Interviews).
Diese Fragen stellen sich daher auch für Sleigh 5.0: Wird der Weihnachtsmann damit so effizient sein wie mit seinem Rentier? Völlig abgekoppelt von seinem Rundgang durch die Schornsteine, wird er nicht ein paar Häuser vergessen? Sehr zum Leidwesen der Kinder...
Bis morgen für neue Überraschungen in unserem UX-Republic-Adventskalender!
Céline POISSON, UX Researcher @UX-Republic – Doktor der Ergonomie
[actionbox color=“default“ title=“DESIGN SPRINT-Schulung -20 %“ description=“-20 % Rabatt auf die Dezember-DESIGN SPRINT-Schulung durch Angabe des Codes 12-UX-DEC bei der Anmeldung! Es ist noch Zeit…“ btn_label=“Unser Training“ btn_link=“http://training.ux-republic.com“ btn_color=“primary“ btn_size=“big“ btn_icon=“star“ btn_external=“1″]
