
Então não, ErgonUX não é uma marca de cosméticos, mas sim o pequeno nome que tenho
dada à metodologia que desdobrei durante uma missão relativa ao desenho de um
veículo autônomo. O objetivo deste artigo é apresentar essa metodologia para você, mas
não apresentaremos aqui os resultados detalhados deste estudo.
No centro das preocupações industriais e políticas, o desenvolvimento do veículo
autônomo é um grande desafio, tanto em termos econômicos quanto de segurança
estradas, mas também o desenvolvimento da mobilidade sustentável. Desde o lançamento do
Google Car em 2010, que deu grande impulso a esta inovação, os fabricantes
automóveis, assim como muitos fabricantes de equipamentos e institutos de pesquisa, estão trabalhando nesse tema.
#1 Mas o que é um veículo autônomo?
Um veículo autónomo é um veículo em que toda ou parte da condução é delegada ao
sistema. Este tipo de veículo representa um ponto de viragem mundial na área automóvel
e destaca uma reviravolta em nossos hábitos de condução
hoje.
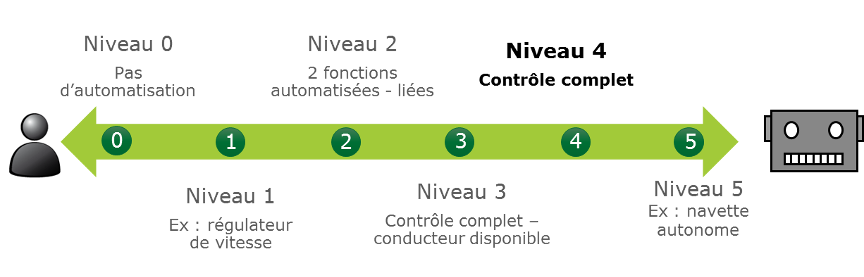
A Society of Automotive Engineers (SAE, 2016) define 6 níveis de automação:
- Niveau 0 : Sem automação:
O condutor deve monitorizar o seu ambiente de condução e realizar a tarefa de condução completa.
- Niveau 1 : Assistência ao condutor:
O sistema suporta uma função da tarefa de condução. O motorista é responsável por todos os aspectos restantes da tarefa de dirigir. O sistema não consegue detetar os limites de todas as suas capacidades, o que continua a ser da responsabilidade do condutor. Este último deve, portanto, monitorar o bom funcionamento do sistema em todos os momentos e recuperar o controle do veículo imediatamente, se necessário. (Exemplo: manutenção de faixa ou controle de cruzeiro).
- Niveau 2 : Automação parcial:
O sistema suporta uma ou mais funções da tarefa de condução simultaneamente. O motorista deve monitorar continuamente o sistema e seu ambiente de direção e é responsável por realizar todos os aspectos restantes da tarefa de direção. Atividades que não sejam de direção não são permitidas. Quando o sistema identifica seus limites, o motorista deve ser capaz de recuperar o controle do veículo imediatamente. (Exemplo: manutenção de faixa e controle de cruzeiro).
- Niveau 3 : Automação condicional:
O sistema cuida de todos os aspectos da condução (controle longitudinal e lateral). O motorista não precisa monitorar constantemente o sistema. Atividades não relacionadas à condução são permitidas de forma limitada. O sistema identifica o limite de sua atuação, porém não é capaz de trazer o veículo de volta ao estado de risco mínimo em todas as situações. Consequentemente, o condutor deve ser capaz de recuperar o controle do veículo dentro de um determinado período de tempo.
- Niveau 4 : Alta automação:
O sistema cuida de todos os aspectos da condução (controle longitudinal e lateral). O motorista não precisa monitorar constantemente o sistema. As atividades sem direção são permitidas durante toda a fase de direção autônoma. O sistema identifica o limite de seu desempenho e pode lidar automaticamente com qualquer situação. No final desta fase de condução autónoma, o condutor deve ser capaz de recuperar o controlo do veículo.
- Niveau 5 : Automação total:
O sistema cuida de todos os aspectos da condução (controle longitudinal e lateral). A ação do motorista não é necessária em nenhum momento. O sistema identifica o limite de seu desempenho e pode lidar automaticamente com qualquer situação que surja durante uma viagem completa (por exemplo: transporte autônomo ou Google Car).
E se o Papai Noel tivesse um trenó autônomo?!
Adeus ao cansaço para as renas que puderam então desfrutar desta noite de partilha com os outros membros da sua tribo.
Rota (ainda mais) otimizada; Papai Noel poderia então passar algum tempo com as crianças. Ele também terminaria sua ronda pelas chaminés mais rapidamente e menos cansado. Isso permitiria que ele se juntasse à Sra. Claus e seus fiéis companheiros, os elfos, para chegar a tempo de comer o famoso tronco de Yule.
Não há mais risco de colisão com estrelas cadentes; não há mais risco de deterioração ou queda do trenó de presentes, para que não haja mais crianças decepcionadas por não terem recebido o presente que tanto esperavam.
Um Natal tranquilo graças ao Sled 5.0.

No nosso estudo, procurámos documentar a atividade de condução autónoma de nível 4. As vantagens deste tipo de automatização, apresentadas, são a segurança (redução do número de acidentes), trânsito (redução dos engarrafamentos que todos detestamos) bem como a possibilidade de otimizar o tempo de condução para realizar outras atividades (ler um jornal ou ver um filme, por exemplo).
No entanto, a introdução deste tipo de veículo ainda levanta muitas questões.
O sistema autónomo, embora assuma todas as funções de condução, pode, a qualquer momento, solicitar ao condutor que recupere o controlo do veículo.
Assim, o condutor deixa de ser responsável pela condução ou pela segurança do veículo. Portanto, não tem obrigação de monitorar o ambiente, nem o comportamento do sistema..
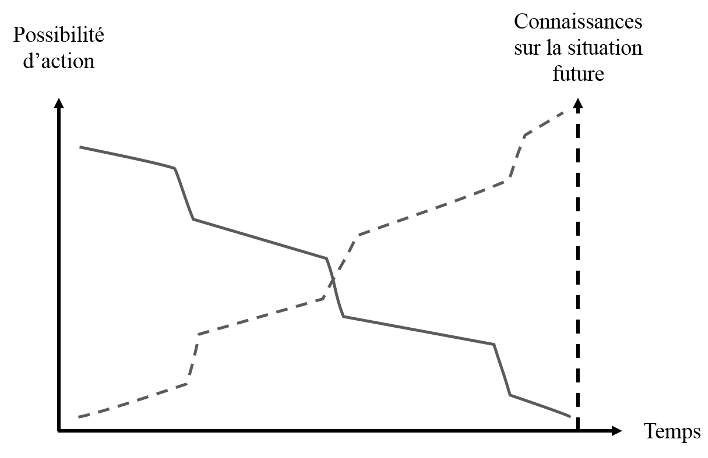
A questão da capacidade do motorista de recuperar o controle do veículo depois de ser "desconectado" da direção é completamente legítima.
#2 Uma visão geral rápida dos efeitos da automação
Em 1983, Bainbridge já sublinhava a ironia que a automação provoca. De fato, as tarefas mais simples são delegadas à máquina e o operador humano deve então executar as tarefas mais complexas. Freyssenet (1984) completa essas afirmações segundo as quais a automação pode dificultar ainda mais as dimensões difíceis da tarefa; e que influencie negativamente o desenvolvimento da competência, crie uma diminuição da atenção ao evento excepcional (que exige uma decisão rápida) bem como uma ansiedade de esperar pelo incidente.
Além disso, vários estudos mostram que o desempenho de direção após uma fase de direção automatizada diminui à medida que o nível de automação aumenta e quando o motorista realiza atividades da vida a bordo.
Isso pode questionar os benefícios da segurança e a capacidade de realizar outras atividades que se esperaria da automação.

#3 O paradoxo do projeto
Como dissemos, queríamos documentar a atividade de condução autônoma de nível 4. Mas esse tipo de veículo ainda não é comercializado e enfrentamos vários obstáculos:
Com efeito, do ponto de vista técnico, os protótipos, embora cada vez mais avançados, permanecem limitados e requerem supervisão constante. Então não é mais como o nível 4.
Do ponto de vista legal, mesmo que fossem comercializados veículos autônomos de nível 4, de acordo com a convenção de Viena, os motoristas devem manter o controle do veículo e permanecer responsáveis pelo veículo durante a condução autônoma; então eles têm que vigiar a estrada e ter as mãos no volante. Portanto, não é mais um veículo autônomo de nível 4, mas sim um nível 3.
Quanto aos protótipos, eles só podem ser pilotados por especialistas.
É, portanto, impossível observar, até à data, as utilizações deste tipo de dispositivo em situações reais, nem compreender a atividade de condução delegada, uma vez que esta ainda não existe. Isso é chamado de paradoxo do design (Theureau e Pinsky, 1984; Daniellou, 2004).
O nosso objetivo foi então encontrar uma forma de ultrapassar este paradoxo de forma a antecipar o mais rapidamente possível as utilizações dos futuros utilizadores e integrá-los nas diferentes fases de projeto deste tipo de veículo.
Para isso, estudamos as chamadas situações de referência de direção assistida; e simulador simulado e situações de pista.
#4 Atividades de condução estudadas
Foram analisados três tipos de situações de condução:
- Situações de condução com sistema de assistência à condução :
A análise diz respeito à atividade de três condutores com um veículo equipado com diferentes sistemas de auxílio à condução. Observamos a realização de duas viagens com cada motorista e buscamos informar sua atividade relacionada ao uso de seu sistema de assistência ao motorista.

- Uma situação de condução autônoma em um simulador :
A análise diz respeito à atividade de vinte e nove motoristas que estiveram em situação de condução delegada no simulador C-CARDS da Renault. Os motoristas fizeram três viagens de 15 minutos na autoestrada limitada a 110 km/h. Destes 15 minutos, os motoristas ativaram a condução autónoma durante cerca de 10 minutos, ao final dos quais o sistema pedia que retomassem o controlo do veículo.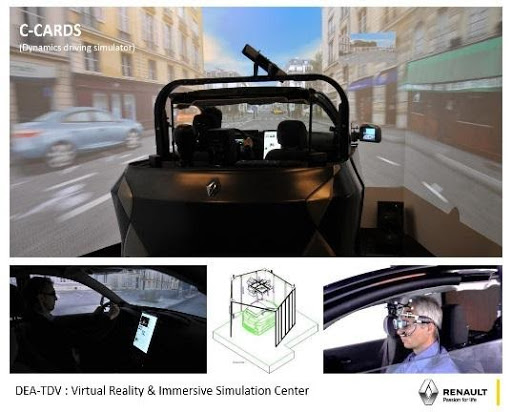
- Uma situação de condução autônoma simulada na pista :
Esta análise diz respeito à atividade de nove motoristas. Para isso, concebemos um veículo do Mágico de Oz, que pode ser conduzido na posição clássica do condutor (a partir do volante e pedais), mas também por um co-piloto, a partir de um joystick oculto ao condutor. Quando o motorista pensou em ativar a direção autônoma, o copiloto assumiu o controle do veículo (através do joystick). Os motoristas fizeram três viagens de 15 minutos na pista de Satory, que limitamos a 50 km/h (por motivos de segurança). Desses 15 minutos, os motoristas ativaram a condução autônoma por aproximadamente 12 minutos, ao final dos quais o sistema solicita que eles retomem o controle do veículo.

#5 Metodologia de coleta de dados
Em nossos estudos, tivemos dois tipos de dados, dados extrínsecos (ou dados de “3ª pessoa”) e dados intrínsecos (ou dados de “1ª pessoa”).
Os chamados dados extrínsecos são os dados dos sujeitos, registrados pelo observador. Eles não levam em conta a experiência da situação do sujeito. São todos os dados não subjetivos coletados sobre o assunto, os observáveis. Por exemplo, tempos de reação, dados biomecânicos, medições de frequência, etc.
Os chamados dados intrínsecos são dados baseados no “ponto de vista do sujeito atuante” (Vermersch, 2010). Esses dados não são da mesma ordem; eles são difíceis de quantificar, mas nos informam sobre as partes não observáveis da atividade do sujeito. Trata-se, então, de acessar as experiências ditas "vividas" dos usuários e, portanto, seu próprio ponto de vista sobre a atividade realizada (Cahour e Créno, 2017)
O objetivo é relacionar o ponto de vista extrínseco sobre a atividade, aquele do pesquisador que observa o sujeito agindo e o ponto de vista intrínseco sobre a atividade, aquele do sujeito que atua em um contexto situacional, que faça sentido para ele. Isso é chamado de triangulação de métodos (Flick, 1992).
Em nossa pesquisa, colocamos os dois tipos de dados no centro de nossos estudos para entender melhor a atividade do motorista em uma situação de condução autônoma e recuperação.
A metodologia de coleta de dados não foi exatamente a mesma para as três situações.
Para as situações de referência, estávamos no veículo com o motorista. Durante as viagens, pedimos ao motorista que verbalizasse sua atividade (na medida do possível).
Uma declaração de papel/lápis também nos permitiu coletar de forma pragmática elementos contextuais para completar as gravações.
Apesar dos ângulos de câmera apertados, também filmamos e fotografamos alguns momentos de sua atividade e os artefatos utilizados.
A metodologia de coleta de dados no simulador e no veículo Mágico de Oz foi bastante semelhante.
Ambos os veículos estavam equipados com inúmeros sensores que nos permitiam registar vários dados como velocidade do veículo, interações com o volante, botões, pedais (travão ou acelerador), piscas, presença/ausência de mãos no volante (graças à presença sensores), ou mesmo o estado do veículo (condução manual, condução autónoma disponível, condução autónoma, pedido de aquisição).
Eles também foram equipados com quatro câmeras sincronizadas cujo conteúdo filmado foi gravado. No simulador, os motoristas estavam equipados com um eye tracker tipo telescópio.

Para a esquerda : captura da gravação das quatro câmeras sincronizadas. Direito : Fotografia de um motorista usando o rastreador ocular (em cima) e a retransmissão do vídeo do rastreador ocular (em baixo).
Por fim, para os três estudos, realizamos entrevistas com os motoristas após cada situação de direção.
#6 "KPI"
Para as situações de condução assistida, anotámos o tempo de utilização dos sistemas de assistência à condução, as frequências e os motivos da sua ativação e desativação.
Para situações de condução autônoma no simulador e com o veículo Mágico de Oz, estávamos interessados em:
- Actividade de condução autónoma, nomeadamente através da realização de actividades da vida a bordo (leitura, utilização do telefone, por exemplo) e suas interrupções :
- Tempo decorrido entre a ativação do sistema autônomo e a conclusão da atividade de vida a bordo (uso do telefone, leitura)
- Tempo total de conclusão da atividade de vida a bordo em comparação com o tempo de condução autônoma
- Tempo máximo para realizar atividades de vida a bordo sem interrupção
- Número, duração, frequência e tipo de interrupção na realização das atividades de vida a bordo
- A actividade de desactivação do sistema autónomo através das várias acções realizadas entre o pedido de tomada de controlo do sistema e a efectiva tomada de controlo do veículo :
- Tempo necessário para parar de realizar sua atividade de vida a bordo
- Entendendo o alerta sonoro via HMI
- Recuperação de informações do ambiente rodoviário
- Retorne à posição de condução (solte as mãos, coloque-as de volta no volante; coloque o pé para trás sobre/no pedal, reposicione-se no banco, olhe para a estrada)
- Hora de desativar o sistema
- Modo de desativação do sistema
#7 Conclusão
Como dissemos, o objetivo deste artigo não foi apresentar os resultados dos três estudos que apresentamos, mas destacar a contribuição, para o projeto do veículo autônomo, das, ou melhor, das metodologias postas em prática.
Todas estas análises permitiram-nos, de facto, desenvolver conhecimentos sobre as necessidades e objetivos dos utilizadores em situações de condução autónoma e antecipar as utilizações deste tipo de veículos, de modo a propor perspetivas de design antropocêntrico.
Além das melhorias nas IHMs ou nos princípios de funcionamento do veículo autônomo, esta pesquisa terá possibilitado destacar elementos que ecoam a ironia da automação que já discutimos no início do artigo.
De fato, em uma situação de condução autônoma, muitos motoristas desativaram o sistema autônomo e, portanto, recuperaram o controle do veículo, antes de poderem voltar a ser motoristas no controle de seu veículo.
Alguns motoristas retomaram o controle do veículo antes de olhar para a estrada; e quase todos os motoristas o fizeram sem perder tempo olhando para os retrovisores. Eles, portanto, recuperaram o controle do veículo sem ter todas as informações de direção.
“Quando recupero o controle, não tenho necessariamente todas as informações sobre o que me rodeia. Há um tempo para se desconectar do que você está fazendo, para analisar a situação que é completamente nova, a velocidade, a situação na estrada em relação aos outros. Então eu volto gradualmente enquanto recuperei o controle imediatamente. »
(Trechos de entrevistas).
Outros recuperaram o controle do veículo antes de colocar as mãos no volante ou ainda segurando o objeto de sua atividade de vida a bordo, sem ter tido tempo de se libertar dele.
“Há um pequeno momento de hesitação. […] Então eu recuperei o controle, mas minhas mãos ainda não estão ativas. E não é normal. Na verdade, não agarro o volante imediatamente porque não sinto que estou no controle do veículo. E eu me vejo tendo esse atraso e me dizendo “por que você não pega o volante na mão”. […] Há um momento em que o veículo fica sem controle em termos de direção. Por um curto período de tempo, ninguém está no controle do veículo. »
(trechos da entrevista).

Fotografias de um motorista que recupera o controle do veículo sem se dar ao trabalho de largar a revista que estava lendo durante a condução autônoma.
Por fim, os motoristas com um dispositivo de correção da visão (de longe, para dirigir ou de perto, para realizar sua atividade de vida a bordo durante a condução autônoma) recuperaram o controle do veículo sem perder tempo para colocar ou tirar os óculos. Eles, portanto, recuperaram o controle do veículo sem ter a correção visual correta.

A fotografia ao lado mostra-nos um condutor que não teve tempo para retirar os óculos (de que necessitava na condução autónoma para poder ler as suas mensagens no telemóvel) antes de retomar o controlo do veículo. Notamos que ele ainda consegue olhar para a estrada sem os óculos abaixando a cabeça e olhando por cima deles.
Esta situação não pôde ser remediada para os motoristas que tiraram os óculos ao realizar sua atividade de vida a bordo e que recuperaram o controle antes de poder colocá-los novamente.
Pode-se então questionar as vantagens em termos de segurança rodoviária apresentadas, no que diz respeito à utilização deste tipo de veículos. Com efeito, é provável que com um sistema eficiente, o número de acidentes, na condução autónoma, diminua. Mas não é provável que isso aumente devido a acidentes criados quando o veículo é retomado?
Além disso, não há problemas éticos em colocar o motorista em uma posição que ele não seria capaz de lidar adequadamente? Esse tipo de veículo dá aos motoristas os meios para serem “bons” motoristas? Ou, pelo contrário, não reduz sua capacidade de atuar como motorista? Os motoristas concordarão em comprar um veículo que possa colocá-los, quando assumirem o controle, em uma situação mais perigosa do que sem automação?
“Passo de totalmente desconectado a ter que ser um motorista operacional. […] Não tenho todas as bolas para voltar a operar. »
(Trechos de entrevistas).
Essas questões, portanto, também surgem para o Trenó 5.0: permitirá que o Papai Noel seja tão eficiente quanto com suas renas? Estando completamente desconectado de seu passeio pelas chaminés, ele não vai esquecer algumas casas? Para desgosto das crianças...
Até amanhã para novas surpresas em nosso calendário do Advento da UX-Republic!
Céline POISSON, UX Researcher @UX-Republic – Doutor em Ergonomia
[actionbox color=”default” title=”treinamento DESIGN SPRINT -20%” description=”-20% de desconto na sessão de treinamento DESIGN SPRINT de dezembro, dando o código 12-UX-DEC ao se registrar! Ainda dá tempo…” btn_label=”Nossos treinamentos” btn_link=”http://training.ux-republic.com” btn_color=”primary” btn_size=”big” btn_icon=”star” btn_external=”1″]
